


15818624218

郵箱:liusyscnc@qq.com
QQ:790708208
地址:深圳市光明區光明街道碧眼社區華強創意公園5棟A座19樓
 當前位置:
當前位置:四元數數控:視覺對位系統不抓點是什么原因?
一,視覺對位系統不抓點是什么原因?
主要是Mark點,好的軟件可以支持MARK自定義選取。貼合的精度與Mark的大小也有關系,所以Mark越小,一致性越好,對位精度就越高!
二,視覺定位系統的組成
機器人視覺定位系統構成如圖 1 所示,在關節型機器人末端安裝噴涂工具、單個攝像機,使工件能完全出現在攝像機的圖像中。系統包括攝像機系統和控制系統:

(1)攝像機系統:由單個攝像機和計算機(包括圖像采集卡)組成,負責視覺圖像的采集和機器視覺算法;
(2)控制系統:由計算機和控制箱組成,用來控制機器人末端的實際位置;經 CCD 攝像機對工作區進行拍攝,計算機通過本文使用的圖像識別方法,提取跟蹤特征,進行數據識別和計算,通過逆運動學求解得到機器人各關節位置誤差值,最后控制高精度的末端執行機構,調整機器人的位姿。
噴涂機器人視覺定位系統組成
三,視覺定位系統工作原理
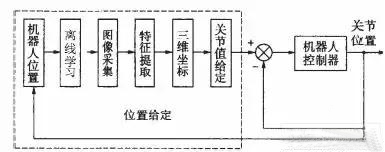
視覺定位系統的工作原理
使用 CCD 攝像機和1394 系列采集卡,將視頻信號輸入計算機,并對其快速處理。首先選取被跟蹤物體的局部圖像,該步驟相當于離線學習的過程,在圖像中建立坐標系以及訓練系統尋找跟蹤物。學習結束后,圖像卡不停地采集圖像,提取跟蹤特征,進行數據識別和計算,通過逆運動學求解得到機器人各關節位置給定值,最后控制高精度的末端執行機構,調整機器人的位姿。工作流程如圖2 所示。

四,視覺定位系統軟件流程圖
基于區域的匹配
本文采用的就是基于區域的相關匹配方法。它是把一幅圖像中的某一點的灰度領域作為模板,在另一幅圖像中搜索具有相同(或相似)灰度值分布的對應點領域,從而實現兩幅圖像的匹配。在基于區域相關的算法中,要匹配的元素是固定尺寸的圖像窗口,相似準則是兩幅圖像中窗口間的相關性度量。當搜索區域中的元素使相似性準則最大化時,則認為元素是匹配的。
定義P (i, j) P 是模板圖像中一點,取以P (i, j) P 為中心的某一鄰域作為相關窗口K ,大小為(2w +1),假設K 在原始圖中,水平方向平移Δu ,垂直方向平移Δu 后,K 所覆蓋下的那塊搜索區域叫做子圖S k ,若K 和S k 相同,則它們的差為零,否則不為零。